本計畫配合本中心「現代化測繪科技發展計畫」(104~107年)、「多元測繪科技整合應用計畫」(108~111年)及「智慧衛星定位及移動測圖科技發展計畫」(112~115年)等中程計畫,陸續辦理系統建置、軟硬體改裝、移動測圖研究發展及外業掃瞄任務等作業。104年度採用本中心公務車改裝車移動測繪系統(Mobile Mapping System, MMS),搭載高精度定位定向元件(全球導航衛星系統GNSS、慣性導航元件IMU)、8部工業級相機(910萬像素)及輪速計等,並開發監控軟體於儀器運作時進行運作情形之監控。105年度辦理車載移動測繪系統定位定向解算軟體、像片量測軟體、購置4台高階繪圖電腦、試辦個人攜行式移動測繪系統等作業。
106及107年度發展車載光達系統(Mobile LiDAR System, MLS)。108年度辦理車載光達系統率定方法之研究並規劃建置率定場。109年度辦理車載光達校正系統方法確認、校正領域認證作業先期評估及精進MLS定位精度研究等作業,並於交通部運輸研究所運輸技術研究中心(改制前港灣技術研究中心,以下簡稱運技中心)建置車載光達系統校正場。110年度建置車載光達校正系統及申請「財團法人全國認證基金會」(Taiwan Accreditation Foundation,TAF)認證。111年度完成TAF認證及辦理試營運作業。112年度辦理MLS外業掃描任務計掃瞄距離202公里。113年度辦理MLS外業掃描任務計掃瞄距離185公里。114年度辦理MLS外業掃描任務計掃瞄距離61.6公里。
108年度為充分運用MLS具有高精度、高效率、多元載具之特性,辦理局部圖資更新、光達幾何精度檢測、3D道路、軌道及捷運模型建置試辦作業、法院鑑測案件現地掃描作業及測試、MLS及UAS整合測試作業等項,計完成15個任務派案,實際掃描軌跡長度總計為346.2公里。成果如下表:
另為提升光達測繪技術技術,確保測繪成果品質,108年度進行光達及影像感測設備率定方法之相關研究,並於成功大學歸仁校區及運技中心以本中心MLS實地驗證率定程序及方法之可行性,已有初步成果,未來將持續建立光達測繪系統校正作業機制,並規劃於111年度取得「財團法人全國認證基金會」(Taiwan Accreditation Foundation,TAF)增列認證,達成光達測繪系統校正服務之目標。
UAS及MLS在圖資測繪作業上各具有不同優點及互補性,相關系統及資料整合為未來發展3D圖資測繪的重要課題之一,本中心於108年度透過UAS及MLS聯合作業方式,快速蒐集所需空間資訊並產製三維模型成果,其中UAS主要提供大範圍地表、建物屋頂、樹冠等資訊;MLS則提供地面及地物側面資訊、隧道或高架橋底下UAS無法取得資料之地區。經以臺中糖廠為測試區測試結果,MLS確實能成功補足UAS影像無法拍攝之區域,UAS於空中拍攝時無法拍攝屋簷底下資訊;MLS光達點雲可增加該區域點雲資料。此外,使用影像進行密匹配時,其演算法常將電線、電桿等細長形狀稀疏點雲視為雜訊,MLS亦可有效補充相關地物點雲資訊。
UAS影像匹配點雲(左)與UAS影像點雲結合MLS光達點雲成果比較(右)
 結合UAS影像點雲及MLS光達點雲進行三維精緻建模成果(臺中糖廠)
結合UAS影像點雲及MLS光達點雲進行三維精緻建模成果(臺中糖廠)
五、109年度辦理成果
109年度延續研究成果,以2年(109及110年)為期,建立自主車載光達校正系統,通過「財團法人全國認證基金會」(Taiwan Accreditation Foundation,TAF)認證及納入本中心測量儀器校正實驗室,以達成車載光達校正服務之目標。本年度辦理光達測繪車校正方法確認、校正場建置、校正領域認證作業先期評估、校正場資料處理工具建置、光達測繪系統軟硬體設備維護等作業。另辦理一般性圖資更新案,並配合建置MLS校正作業案、精進MLS精度委託研究案及3D道路模型資料建置案進行試辦作業,計完成14個任務派案,實際掃描軌跡長度總計為124.5公里。
項次 | 任務地點 | 掃描軌跡(KM) | 備註 |
|---|
| 1 | 中科臺中園區擴建用地(原大肚山彈藥分庫)開發計畫-西區配合工程及景觀工程 | 7.3 | 局部圖資更新 |
| 2 | 2-1臺南市花園夜市 | 2.4 | 配合109年度精進光達測繪車定位精度委託研究案辦理試辦作業-HD MAP測圖能力驗證 |
| 2-2臺南市成大歸仁校區 | 3.4 |
| 2-3臺南市沙崙自駕車試驗場(車速10km/h) | 3.2 |
| 2-4臺南市沙崙自駕車試驗場(車速20km/h) | 3.2 |
| 3 | 3-1臺中市太平區「空軍防空暨飛彈指揮部坪林營區南側聯外道路」新闢道路 | 4.5 | 局部圖資更新 |
| 3-2臺中市豐原區土地銀行旁空地 | 3.8 |
| 4 | 臺中市地下路段
(忠明南路及環中路一段地下道) | 17.3 | 辦理地下路段掃描輔助三維道路模型資料建置。 |
| 5 | 臺中市黎明社區附近 | 2.1 | 案辦理校正標測試作業 |
| 6 | 臺中市地下路段
(豐原大道一段、豐原大道六段地下道及神岡區大圳路等路段地下道) | 5.0 | 辦理地下路段掃描輔助三維道路模型資料建置 |
| 7 | 臺中市地下路段
(烏日區光日路、高鐵二路、高鐵東路及忠明南路等路段地下道) | 6.4 |
| 8 | 臺中市環中路SLAM成果驗證場域 | 6.0 | SLAM及移動製圖定位定向技術相關程式工具效能優化及先期評估 |
| 9 | 臺中市西區市區道路2處 | 9.6 | 輔助3D道路建置成果檢核試辦 |
| 10 | 臺中市61號快速道及3號國道2處 | 13.6 |
| 11 | 運技中心 | 1.5 | MLS校正場掃描作業 |
| 12 | 12-1臺南市成大(成功校區) | 2.5 | 配合109年度精進光達測繪車定位精度委託研究案辦理試辦作業-研發系統成果驗證 |
| 12-2臺南市花園夜市 | 1.8 |
| 12-3臺南市成大(歸仁校區) | 1.4 |
| 12-4臺南市沙崙車站附近道路 | 4.3 |
| 13 | 13-1臺中市環中路 (車速30km/h) | 8.9 |
| 13-2臺中市環中路 (車速40km/h) | 8.9 |
| 13-3臺中市環中路 (系統壓力測試) | 3.5 |
| 13-4運技中心(系統率定) | 1.0 |
| 14 | 運技中心
(UAS與MLS整合作業) | 2.9 | MLS校正場掃描作業,協同UAS辦理運技中心3D精緻建模建置 |
| 合計 | 124.5 | |
車載光達校正系統相關建置作業,包含校正理論與方法之確認,校正標材質與標形評估測試、設計與製作、校正場規劃與建置、校正實作、成果分析、TAF校正領域認證作業先期評估、校正場資料處理工具開發與MLS軟硬體保養維護作業等。
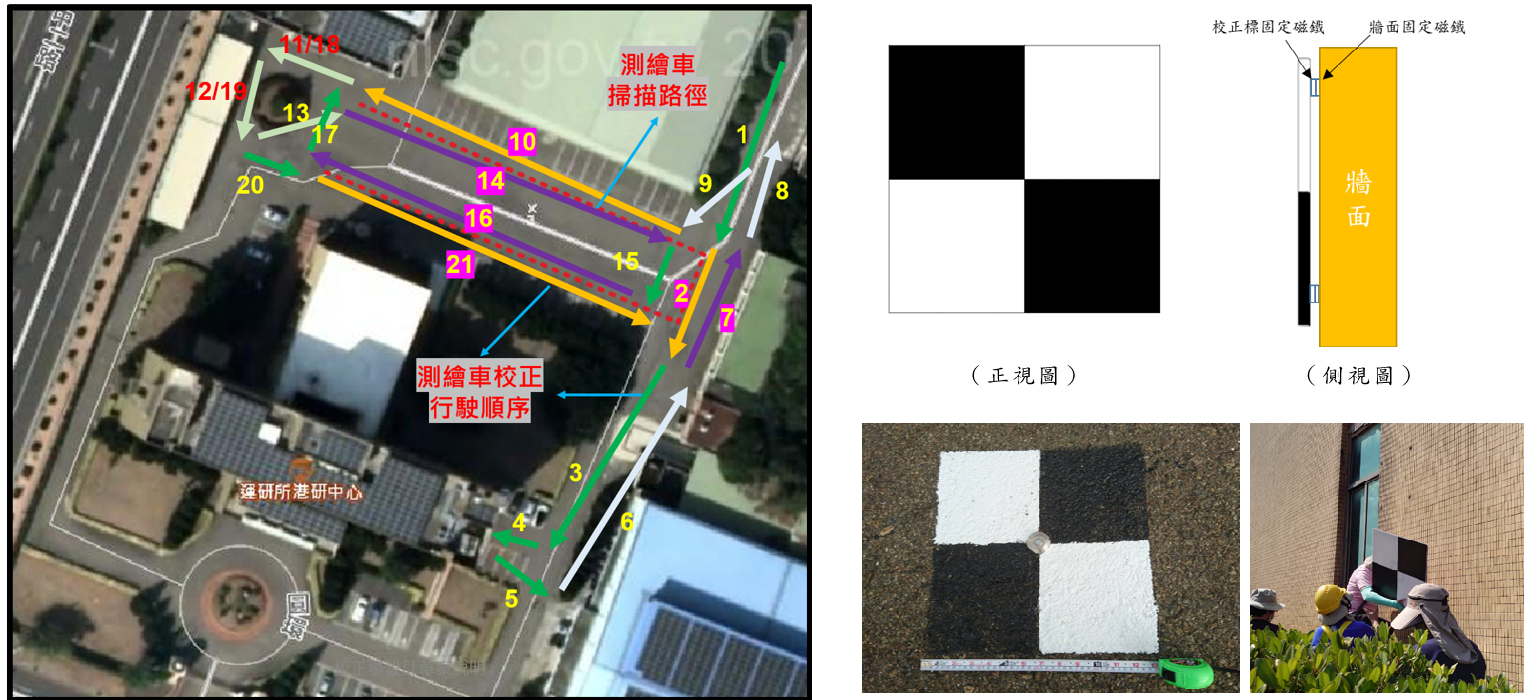
校正場設置於運技中心,校正標經過材質、尺寸之實測確認,於地面繪製8個校正標,與牆面安裝12個可拆式的磁吸式校正標,考量到校正場靠近海邊、風速較強,特別加強抗風性設計,經實際安裝後,具有拆裝方便與穩固性高之特點,符合本校正作業之需求。
有關校正場建置工作,經外部4個網形控制點與場內4個基準點衛星定位測量,確定校正場內基準點之坐標,後經校正標穩定性測試,於校正程序中制訂相關作業規範,校正作業時利用固定點以全測站儀量測校正標中心參考值,並規劃光達測繪車掃描路線,經2次校正實作,確認校正程序執行成果良好,可以分別對地面、水平距離10公尺~27公尺的校正標進行掃描,所產出校正結果能確實反映MLS之測繪能力,經評估可應用於光達測繪車測繪案件,例如高精地圖之測製。
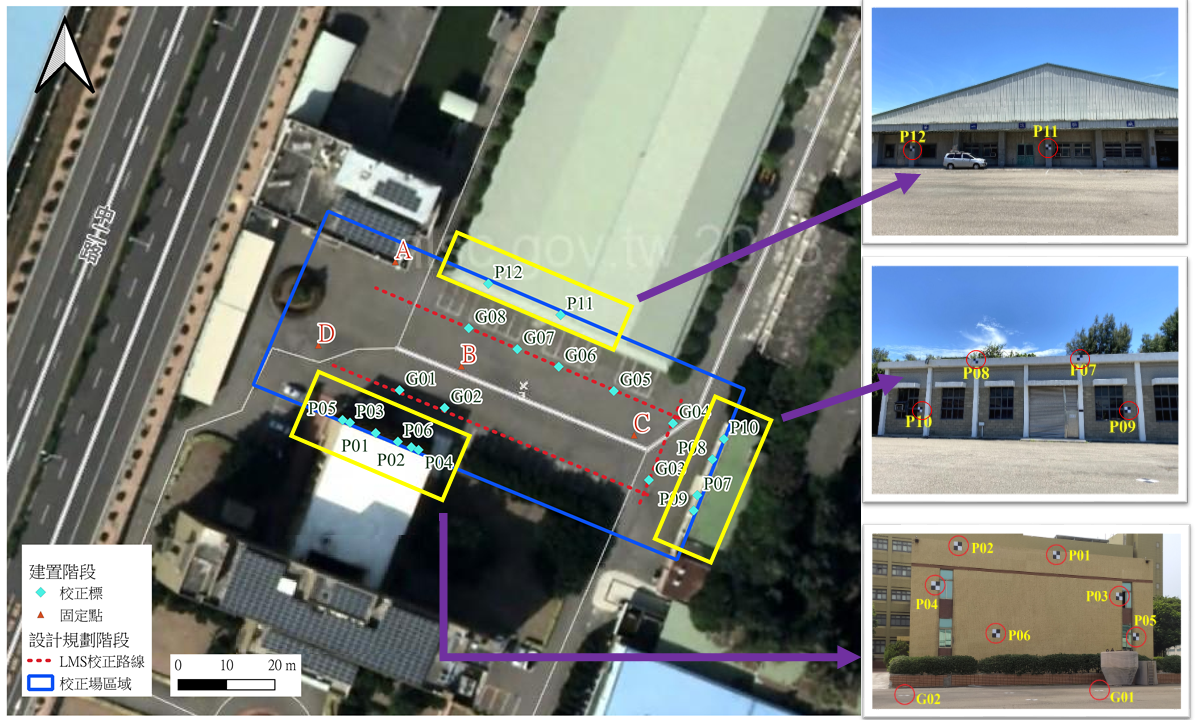 (a) MLS校正場示意圖(運技中心)
(a) MLS校正場示意圖(運技中心)

(b) MLS校正場參考值量測作業

(c)MLSS校正場校正掃描成果

(d) HD MAP測圖能力驗證試辦作業情形
(沙崙自駕車試驗場)

(e) 辦理地下路段掃描輔助三維道路模型資料建置作業情形
(豐原大道一段地下道)
六、110年度辦理成果
110年度賡續辦理車載光達校正系統建置作業,建立校正程序、校正系統評估、校正實作及出具報告、辦理能力試驗活動、內部稽核、教育訓練、品保方案作業、校正資料整合處理工具開發等作業。並配合本中心測量儀器實驗室(SICL)110年延展及增列認證現場評鑑程序,並經TAF於110年12月16至17日及21至22日現場評鑑結果,無不符合事項,達成車載光達校正服務之目標。
本年度另以MLS辦理臺灣通用電子地圖局部道路圖資更新,並以MLS-POS定位輔助建置三維道路模型資料、SLAM技術輔助現況測繪測試、車載光達校正系統案能力試驗活動、校正實作、品保方案及配合成功大學高精地圖中心試辦建立「群眾外包資料更新機制」等相關MLS外業掃描任務,共完成11個派案任務,總計掃描距離118.1公里。
| 項次 | 任務地點 | 掃描軌跡(KM) | 備註 |
|---|
| 1 | 1-1 臺中市黎明社區中正堂 | 1 | SLAM技術輔助現況測繪測試 |
1-2 運技中心
(系統率定) | 1 |
| 1-3 高雄市中正二路地下道路段 | 2 |
| 2 | 2-1高雄市地下道路段4處地下路段
(岡山區大德一路、大德三路、大樹區-新鎮路、大寮區-中正路) | 8 | 以MLS-POS定位輔助建置三維道路模型資料(地下或遮蔽路段部分) |
2-2高雄市地下道路段2處地下路段
(前鎮區-中山四路、小港區-新生路) | 7 |
| 3 | 運技中心 | 2 | 第1次車載光達校正統品保方案及車載光達校正試辦作業 |
| 4 | 4-1 臺61號快速道路-1
王功交流道至大城交流道 | 14 | 以MLS-POS定位輔助建置三維道路模型資料(缺最新版DTM資料之部分路段) |
4-2 臺61號快速道路-2
臺西交流道 | 2 |
| 5 | 5-1 臺61號快速道路-3
臺61布袋交流道 | 2 |
5-2 臺86號快速道路
臺南端出口 | 2 |
| 6 | 臺南沙崙自駕車場周邊場域 | 24.5 | 配合高精地圖試辦群眾外包資料更新機制 |
| 7 | 7-1 新北環快地下道 | 3.5 | 以MLS-POS定位輔助建置三維道路模型資料(缺最新版DTM資料之部分路段) |
| 7-2 安坑一號道路 | 10.1 |
| 8 | 臺65土城交流道及臺65三層道路 | 11.5 |
| 9 | 9-1 臺61新北市八里高架道路 | 5.1 |
| 9-2 桃園機捷田園景觀大道 | 20.4 | 以MLS輔助EMAP局部道路圖資更新作業。(原始圖資無法確認車道之部分路段) |
| 10 | 運技中心 | 1 | 依TAF委員審查意見辦理第2次車載光達品保方案實作 |
| 11 | 運技中心 | 1 | 配合本中心SICL增項認證,TAF現場查核車載光達校正系統實作 |
| 合計 | 118.1 | |
(a) TAF現場評鑑車載光達校正實作(運技中心)
(b)MLS校正作業(運技中心)
(c)MLS-POS定位輔助建置三維道路模型資料作業
(左圖:高雄市大樹區新鎮路地下道,右圖:臺65號快速道路三層道路遮蔽路段部分)
(d)MLS配合高精地圖試辦群眾外包資料更新機制(臺南沙崙自駕車場周邊場域)
(e)MLS配合高精地圖試辦群眾外包資料更新機制拍攝及掃描成果
七、111年度辦理成果
為確保國內車載光達系統(Mobile LiDAR System, MLS)測繪業務成果品質,於109年及110年建立車載光達校正系統,經財團法人全國認證基金會(Taiwan Accreditation Foundation,TAF)於110年12月完成現場評鑑,並於111年3月7日通過TAF認證。並自111年4月15日至111年8月31日舉辦車載光達校正服務試營運推廣活動,提供已建置車載光達設備之機關及民間測繪廠商免費申請校正服務,計已完成自強工程顧問有限公司、勤崴國際科技股份有限公司、詮華國土測繪有限公司及中興測量有限公司等4家廠商申請相關校正服務,並分別於111年7月21日、7月26日、8月31日及10月25日出具校正報告,順利完成本次試營運作業。另有關車載光達校正服務收費標準業由本中心111年11月1日測企字第11115508061號令發布,每部校正服務費為新臺幣8萬元,達成本中心對外提供車載光達校正服務目標。

(a) 車載光達校正場基準點量測作業
(運技中心)

(b)車載光達校正場校正標量測作業
(運技中心)
(c)車載光達校正實際作業情形(運技中心)
八、112年度辦理成果
112年度MLS賡續辦理臺灣通用電子地圖局部道路圖資更新,MLS-POS定位輔助建置三維道路模型資料、車載光達校正系統品保方案及內校作業,並配合內政部高精點雲地圖掃瞄任務辦理國道6號等外業掃描任務,共完成6個派案任務,總計掃瞄距離202公里。
項次 | 任務地點 | 掃描軌跡(KM) | 備註 |
|---|
1 | 運技中心 | 2 | 車載光達校正系統品保方案 |
2 | 運技中心 | 2 | MLS內校作業 |
3 | 國道6號 | 176 | 高精點雲地圖掃瞄作業 |
4 | 4-1 新北市-台61線道路 | 4 | 協助三維道路模型資料測繪案件 |
4-2 新北市-台64線道路-1 | 2 | 協助三維道路模型資料測繪案件 |
4-3 新北市-台64線道路-2 | 2 | 協助三維道路模型資料測繪案件 |
4-4台北市-環東大道路下方 | 2 | 協助三維道路模型資料測繪案件 |
5 | 南崗校正場(小像幅校正範圍) | 10 | 試辦UAS及MLS資料整合研究 |
6 | 臺中市石岡區中91線道路 | 2 | 協助e-map圖資局部更新作業 |
合計 | 202 | |
(a)電子地圖局部更新作業(臺中市石岡區中91線道)
(b)配合內政部高精點雲地圖掃瞄任務(國道6號道路)
(c) MLS-POS定位輔助輔助三維道路模型資料建置(環東大道)
(d)車載光達校正場基準點維護及品保作業(運輸技術研究中心)
九、113年度辦理成果
113年度MLS賡續辦理MLS-POS定位輔助建置三維道路模型資料、車載光達校正系統品保方案及內校作業,並配合內政部高精點雲地圖掃瞄任務辦理國道4號等外業掃描任務,共完成6個派案任務,總計掃瞄距離185公里。
項次 | 任務地點 | 掃描軌跡(KM) | 備註 |
|---|
1 | 運技中心 | 2 | 車載光達校正系統品保方案 |
2 | 國道4號(清水端-豐原端) | 68 | 高精點雲地圖掃瞄作業 |
3 | 國道4號(北屯端-神岡端) | 80 | 高精點雲地圖掃瞄作業 |
4 | 4-1 台76線芳苑至二林路 | 12 | 協助三維道路模型資料測繪案件 |
4-2 中科二林園區聯外道路 | 2 | 協助三維道路模型資料測繪案件 |
4-3二林鎮彰129線(太平路)拓寬工程 | 5 | 協助三維道路模型資料測繪案件 |
4-4台北市-環東大道路下方 | 3 | 協助三維道路模型資料測繪案件 |
5 | 運技中心 | 2 | MLS內校作業 |
6 | 嘉義湖子內重劃區 | 11 | 協助e-map圖資局部更新作業 |
合計 | 185 | |
(a)配合內政部高精點雲地圖掃瞄任務(國道4號道路)
(b) MLS-POS定位輔助輔助三維道路模型資料建置(彰化縣、嘉義市)
(c) 車載光達校正場基準點維護及品保作業(運輸技術研究中心)
十、114年度辦理成果
114年度MLS賡續辦理車載光達校正作業、內政部「數位道路圖資更新管理機制及自動化更新技術研發案」整合第三方圖資更新評估作業,及以MLS-POS定位輔助三維道路模型資料建置等業務執行掃瞄任務,辦理新竹市部分街道等6個外業掃描任務,總計掃瞄距離61.6公里。
項次 | 任務地點 | 掃描軌跡(KM) | 備註 |
|---|
1 | 運技中心 | 2 | 車載光達校正系統品保方案 |
2 | 國道1號增設銜接台74線系統交流道工程 | 15.2 | 協助三維道路模型資料測繪案件 |
3 | 國道3號烏日交流道聯絡道延伸至芬園段新闢工程 | 11.2 | 協助三維道路模型資料測繪案件 |
| 4 | 彰濱鹿港工業區南側鹿安橋(彰30)銜接西濱快速公路橋下道路工程
| 2 | 協助三維道路模型資料測繪案件
|
5 | 國道2號大園交流道至台15線新闢高速公路工程 | 11.2 | 協助三維道路模型資料測繪案件 |
6 | 新竹場域 | 20 | 配合內政部「數位道路圖資更新管理機制及自動化更新技術研發案」配合整合第三方圖資更新評估作業 |
合計 | 61.6 | |
(a)配合內政部「數位道路圖資更新管理機制及自動化更新技術研發案」配合整合第三方圖資更新評估作業(新竹市街區)
(b) 車載光達校正場基準點維護及品保作業(運輸技術研究中心)